水中を泳ぐ分子ロボットを創出~ミクロな空間を動物のように移動するとても小さな無人型ソーラー潜水艦~
【ポイント】
- 自身のヒレを動かし水を掻くことで水中を泳ぐ分子ロボットを実現。
- 実験を通じて,プランクトンほどの大きさの物体が水中を泳ぐための新たな方法を提示。
- 狭い空間を移動する自動運転型分子ロボットの実現に光明。
【概要】
北海道大学大学院理学研究院の景山義之助教らの研究グループは,動物のように体を動かしながら泳ぐ,1mmより小さな分子ロボットを,人工的に作り出すことに成功しました。
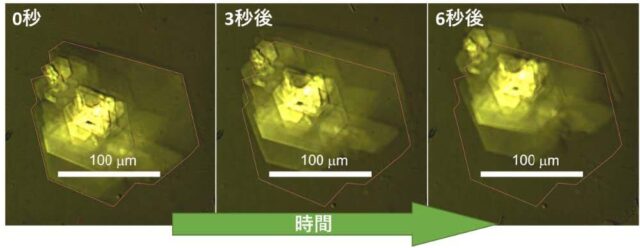
血管のような狭い空間を自在に泳げる分子ロボットの実現は,小説や映画の中で夢見られてきた事柄です。しかし,小さな分子ロボットを自律的に泳がせるためには,科学的に難しい二つの課題を解決しなくてはなりません。一つは,変形を続けられる分子ロボットを作ることです。またもう一つは,その変形によって分子ロボットが移動できるようにすることです。景山助教らの研究グループは,2016年に「屈曲を繰り返す分子ロボット」を発表しています。本研究では,その分子ロボットを水中で泳がせることに成功しました。動物のように自分の体を自律的に動かして泳ぐ分子ロボットを実現した世界初の研究成果です。
なお,この研究の背景には,プランクトンほどの大きさの物体は,ヒレを屈曲させるような往復型の変形だけでは泳ぐことはできない,という物理学における共通の理解があります。これに対して,本研究では,屈曲運動を示す分子ロボットが泳ぎました。この事実は,ロボットが変形を繰り返したことに加えて,別の仕組みが働いていることを示しています。研究グループは,分子ロボットに働く力を計算することを通じて,泳いだ空間が狭いことが分子ロボットの遊泳を可能にした主要因であると結論付けました。
分子ロボットが自律遊泳できることを実験的に示した本研究は,分子ロボットの新たな可能性を示すものです。例えば,血管のような狭い水路を清掃したり,狭路を遊泳することで薬物等を送達したりする「自動運転型分子ロボット」の実現可能性を高めるなど,分子ロボット開発のさらなる発展を期待させる研究成果です。
なお,本研究成果は,2021年11月27日(土)公開のSmall誌にオンライン掲載されました。
詳細はプレスリリースをご覧下さい。