
昆虫が自分の体サイズを認識していることを証明
皆さんはお家の中で「鴨居」に思わず頭をぶつけたことはありませんか?自分の身長をきちんと把握して、鴨居の高さを見積もることができれば、少し頭を下げるか、そのままくぐれるかを判断できますよね?動物は様々な感覚器官によって外界を知覚しますが、障害物が多い場所や複雑な地形の上を移動する時、その経路を決定するためには、周囲の空いている空間の中から自分が移動できるスペースを認識する必要があります。自分が移動できるかどうかを判断するためには、利用可能な空間のサイズと自分自身の身体のサイズとを比較しなければなりません。空間の情報を得るためには一般的に視覚が用いられますが、視覚が使えない夜や暗所では機械感覚(体性感覚)が重要な手掛かりになります。げっ歯類は、鼻の左右に伸びているヒゲを移動経路上の障害物へ接触させることによって、自分が通れるかどうかを見極めていると考えられています。昆虫は、げっ歯類のヒゲ感覚器と同じように、触角を積極的に動かして周囲にある物体を触って検出します。私達は以前の研究(Ifere et al., J. Exp. Biol., 225: jeb243276, 2022)で、コオロギが触角を用いて周囲の障害物を「認識」していることを報告しました。しかし、昆虫が経路決定のためのもう一つの重要な情報である、「自分の体サイズ」を知っているかどうかは分かっていませんでした。
私たちは、前の研究と同様の実験方法を用いて、この問題に取り組みました。コオロギは腹部末端に尾葉と呼ばれる機械感覚器官を持ち(図1A)、短い気流刺激に対して気流の反対方向へすばやく移動する逃避行動を示します。以前の研究で、コオロギの前方に置いた障害物に触角を触らせた状態で気流刺激を与えると、触角の機械感覚入力によって障害物を避けるように逃避行動が変化することを明らかにしました。そこで、今回の研究では、様々な幅の隙間をあけた壁状の障害物をコオロギ前方に進路を遮るように置き、隙間の幅に伴って逃避行動がどのように変化するかを調べました。コオロギを空気流で浮かせた球形のトレッドミル装置の上に保持し、その前面に0ミリ〜20ミリ幅の隙間の空いた壁状の物体を提示します(図1B)。コオロギに触角で物体を触らせた状態で、コオロギの後ろから短い気流パフを与えます。気流刺激によって誘発された逃避運動をトレッドミルの横に設置した2つの光学マウスで検出し、トレッドミルボールの回転から仮想空間上でのコオロギの軌跡や速度、体の向きを計測しました。
隙間がない壁の場合は、以前の研究で報告したように、逃避行動の進路は右または左に大きくカーブし、まっすぐ前方へ逃避することはありません。しかし、隙間の幅が広くなるにつれて、左右へのカーブが減り、前方へ逃避するようになりました(図2A)。直進方向(刺激の逆方向)と逃避した方向のズレの大きさを、隙間がない(0ミリ)の場合と比較したところ、隙間が12ミリ以上に広くなると統計的に有意に小さくなりました。実験に使用したコオロギの胴体部分の幅はおよそ7ミリなので、おそらく彼らは自分が十分に通れる幅かどうかを判断して、逃避方向を変化させていると考えられます。今回の実験でも、以前の研究と同様に、気流刺激はコオロギが静止している、つまり触角からの接触入力に何も行動反応を示さない状態で与えています。また、隙間が広くなるにつれて反応までにかかる時間(反応潜時)は短くなり、逆に移動する距離が長くなったことから考えると、触角入力が逃避行動を反射的に抑制している訳ではなく、コオロギはそれまで触っていた触角からの入力をもとに隙間の大きさを認識し、それを自分の体サイズと照らし合わせて通行可能な経路を決定していると考えられます。さらに、方向によらずに利用可能な経路を認識できるかを調べるため、円筒状の壁にコオロギが十分通行可能であると思われる16ミリの隙間をいろいろな方向に(前方正面から0º, 30º, 60º)設け、円筒の内側にコオロギを置いて同様の実験を行いました。その結果、隙間の方位によって逃避進路が隙間の方向に偏っていきましたが、反応潜時や移動距離は変化しませんでした(図2B)。すなわち、コオロギは自分の通行可能な隙間の幅を、その向きに関わらず認識できることが分かりました。
以上の結果から、コオロギは、触角のアクティブセンシングによって利用可能な空間の大きさや場所を認識するだけでなく、自分の身体の大きさと照らし合わせて移動経路を決定していることが明らかとなりました。これはコオロギが自分自身の大きさを知っていることを意味しており、昆虫が自己認識(self-awareness)能力を示唆するものです。コオロギは不完全変態昆虫なので、孵化した直後の幼虫でも同じように触角と尾葉を持ち、周囲の空間や気流の流れを知覚していると考えられます。成長に伴って身体が大きくなっていくにつれて、このような認識している自分の身体の大きさも変化していくのかを調べていきたいと考えています。
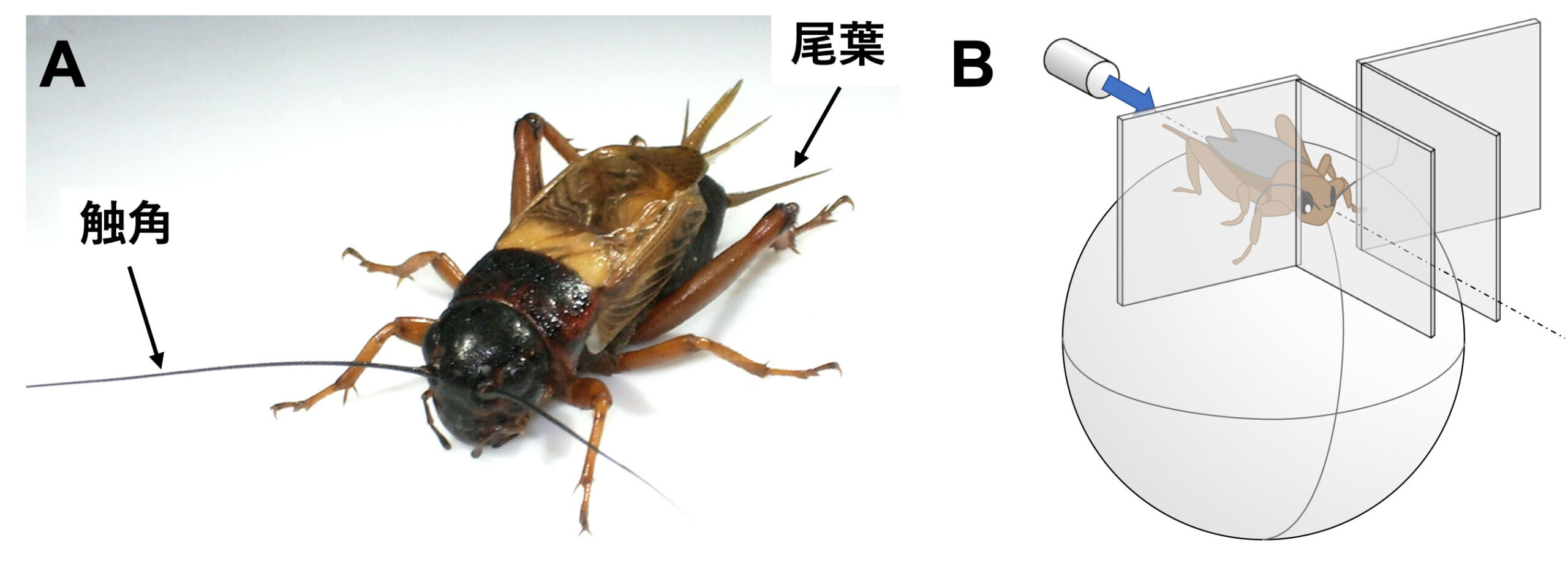
図1 A:コオロギの触角器官と尾葉器官。B:実験装置の模式図。
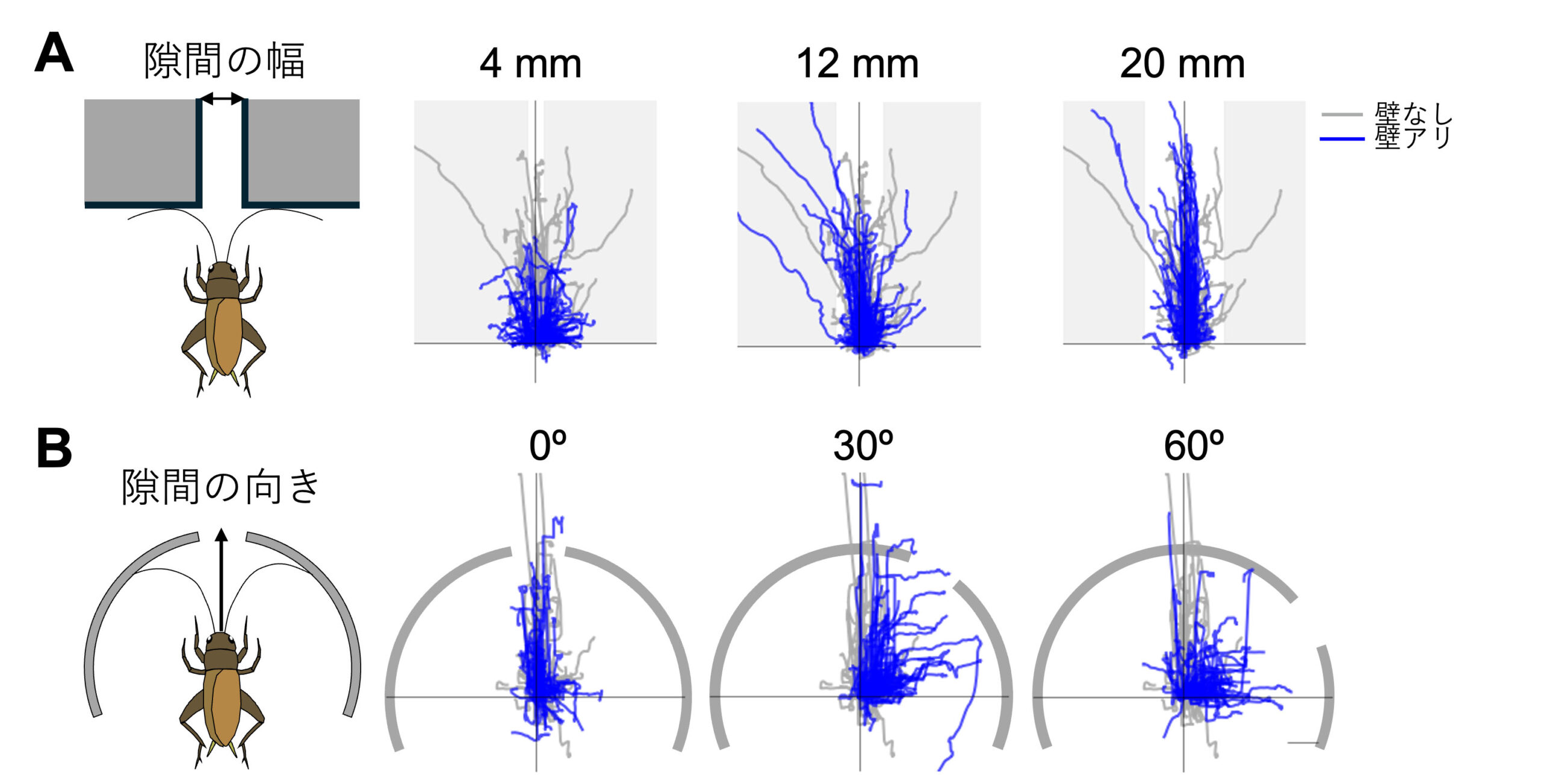
図2 コオロギ前方に隙間のある障害物を置いた場合の,後方から与えた気流刺激で生じた逃避行動の軌跡。グレーは障害物がない場合,青は障害物がある場合を示している。A:4, 12, 20ミリ幅の隙間のある壁を置いた場合。隙間が広くなるにつれて、徐々に直進するようになった。B:円筒状の壁に16ミリの隙間を前方正面に対して0°、30°、60°の方向に設置した場合。正面から隙間がずれるにつれて移動軌跡が隙間方向に変化していった。
【論文情報】
論文名:Identification of available travel paths’ size and orientation by antennal mechanosensory system of crickets
著者名:Nwuneke Okereke Ifere, Hisashi Shidara, Nodoka Sato, and Hiroto Ogawa
雑誌名:Journal of Insect Physiology 163:10416.
リリース配信日時:2025 年 5 月 3 日(日)(オンライン公開)
DOI:https://doi.org/10.1016/j.jinsphys.2025.104816