
昆虫が触角で「空間認識」していることを証明 ~コオロギは“ショッカク”で世界をイメージする?~
行動神経学系の小川研究室では、大学院生のNwuneke Okereke Ifereさんらが中心に行った、コオロギの空間認識に関する研究成果を論文として発表しました。触覚によるアクティブセンシングの重要性を提示すると同時に、コオロギが周囲の空間を「イメージ」する能力についても新たな示唆を与える重要な研究です。北海道大学のプレスリリース記事として公開されています。以下、小川先生による解説です。
動物は様々な感覚器官によって外界を知覚します。周囲の空間の情報を得るためには視覚が最も有効ですが,視覚が使えない夜や暗所では機械感覚(体性感覚)が重要な手掛かりになります。特に,げっ歯類のヒゲや昆虫の触角は,それを積極的に動かすことによって周囲にある物体を検出します。このように環境に積極的に働きかけることによって感覚情報を得る手法を,アクティブセンシングと呼びます。これまで昆虫の触角の機械感覚に関する多くの研究が行われ,触角への刺激に対する反応や接触した物体に対する定位について報告されてきました。しかしこれまでの研究では,昆虫が触角を用いて周囲を「認識」しているかは不明でした。なぜなら周囲の空間全体を認識しなくても,触角への接触刺激に対して一定の空間的関係性をもって動物が反応すれば,このような行動を示すことはできるからです。したがって,空間認識能力を確認するためには,触角入力とは直接関係ない行動が,触角のアクティブセンシングによって知覚された物体の配置や向きによって変化するかを検証する必要があります。ほ乳類などでは空間的な手掛かりと報酬などを関連付けた学習実験で確認されることが多いのですが,私たちは,別の感覚器への刺激によって引き起こされる,コオロギの気流誘導性逃避行動を用いてこの問題に取り組みました。コオロギは腹部末端には尾葉と呼ばれる機械感覚器官を持ち(図1A),短い気流刺激に対して刺激源からすばやく遠ざかる逃避行動を示します。そこで,コオロギの前方や側方に置いた様々な物体に触角を触らせた状態で気流刺激を与え,触角の機械感覚入力によって逃避行動が変化するかを調べました。
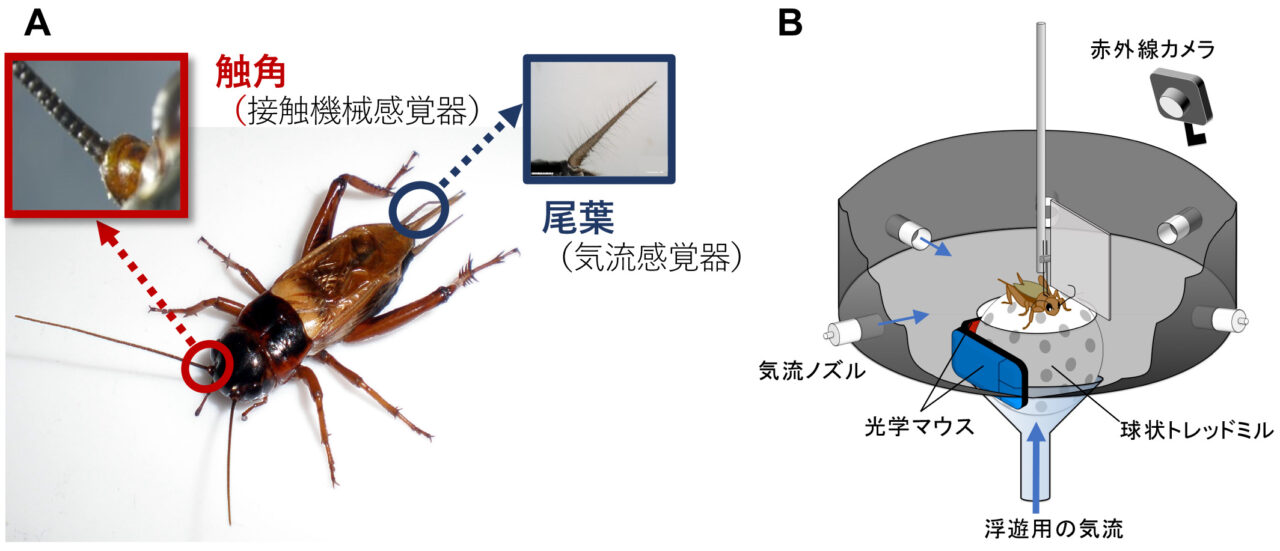 図1 A:コオロギの触角器官と尾葉器官。 B:実験装置の模式図。
図1 A:コオロギの触角器官と尾葉器官。 B:実験装置の模式図。
コオロギを空気流で浮かせた球形のトレッドミル装置の上に保持し(図1B),その前面や側面に棒状または壁状の物体を提示します。コオロギに触角で物体を触らせた状態で,コオロギの後ろ,または横から短い気流パフを与えます。コオロギは気流刺激の反対側に走って逃げようとしますが,その運動をトレッドミルの横に設置した2つの光学マウスで検出し,トレッドミルボールの回転から仮想空間上でのコオロギの軌跡や速度,体の向きを計測しました。物体までの距離や位置,壁状の物体の向きを様々に変えて,コオロギの逃避行動に対する影響を調べました。
まず棒状の物体と壁状の物体を,それぞれコオロギの斜め前方の遠位(触角先端から5ミリ内側の場所),または近位(触角の半分の場所)に置き,コオロギの後方または側方から気流刺激を与えました。いずれの場合も,壁を近位に置いたときにだけ移動方向が変化しました。壁のない場合は後方からの刺激に対してほぼ直進しますが,壁がある場合には壁の反対側に進路が偏ります(図2A)。一方,壁の反対側の側面から刺激すると,壁のない場合は刺激の反対側(図2Bの90°)に移動しますが,壁があると進路は後方に偏りました(図2B, C)。つまりコオロギは刺激方向によらず,常に壁への衝突を避けるように,逃避行動の進路を変更したのです。しかし,遠位の壁や棒状の物体は刺激方向に関わらず逃避行動に影響はありませんでした。これは,コオロギは物体の形状や位置を把握し,それによって自分の進む方向を変化させたと考えられます。しかし気流刺激のないときの自発的な歩行では,壁から離れようとしたり,逆に近づいたりする傾向は見られなかったことから,単に触角の入力に対する反射的な行動ではないことも証明されました。
次に,コオロギ前方に進路を遮るように壁を配置して,後方から気流刺激を与えました。両方の触角が接触できるように壁を正面に位置させると,逃避行動の進路は右または左に大きくカーブし,まっすぐ前方への進路は減少しました(図2D)。一方,片方の触角だけが接触できるように左右どちらかに壁をずらすと,逃避進路は壁のない方側にカーブしました。しかも正面に壁を置いた場合にだけ,反応までにかかる時間や移動する距離が短くなったことから,単に触覚入力が逃避行動を抑制している訳ではなく,障害物の配置を認識し,衝突可能性が高い場合にはそれを避けようとしているためだと考えられます。さらに,コオロギは正面の障害物の位置を,左右の触角からの入力を比べることによって検出しているのかを調べるために,ずらした壁の反対側,つまり壁にほとんど触れない側の触角を切断して,同様の実験を行いました。しかしそれでも,逃避進路は壁の反対側へ偏りました。おそらく,残っている触角が壁の中央側の縁を検出することで,壁の位置を正確に把握できたと思われます。
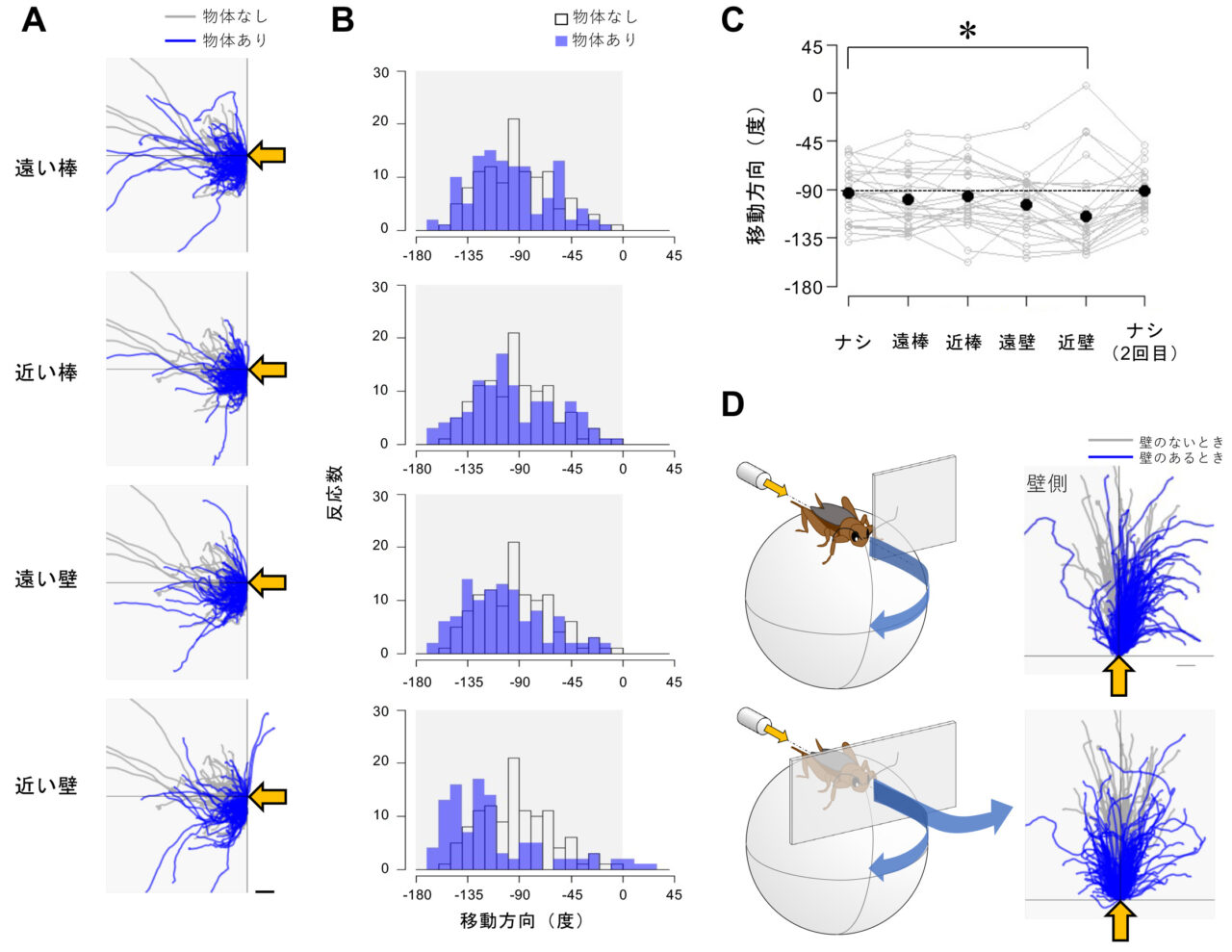 図2 A, B:側面に棒状の物体と壁状の物体を置いたときの,横から与えた気流刺激で生じた逃避行動の軌跡(A)と移動方向の分布(B)。C:様々な物体と位置と移動方向の関係。近い場所に壁を置いた場合に,移動方向が後方に偏った。D:コオロギの前に壁を設置したときの逃避行動進路。上は左半分に,下は中央に壁を設置した場合。壁がない場合は直進するが(グレー),上では壁と反対側に,下では左右のどちらかに軌跡(青)がカーブする。
図2 A, B:側面に棒状の物体と壁状の物体を置いたときの,横から与えた気流刺激で生じた逃避行動の軌跡(A)と移動方向の分布(B)。C:様々な物体と位置と移動方向の関係。近い場所に壁を置いた場合に,移動方向が後方に偏った。D:コオロギの前に壁を設置したときの逃避行動進路。上は左半分に,下は中央に壁を設置した場合。壁がない場合は直進するが(グレー),上では壁と反対側に,下では左右のどちらかに軌跡(青)がカーブする。
以上の結果から,コオロギは,触角のアクティブセンシングによって検出した障害物の位置や形状に合わせて,衝突を回避するように逃避行動を変化させることが明らかとなりました。これは単に触角入力に対する単なる反射ではなく,周囲の物体に関する空間情報を認識していることを示唆するものです。
機械感覚による空間認識はヒトにとっても重要です。例えば,突然暗闇に置かれたとき,私たちは耳を澄ますのではなく,匂いを嗅ぐのでもなく,腕をのばして辺りを探り,物体や壁などの手掛かりを得ようとします。また,視覚障害者は屋外を移動するとき,白杖を使って障害物を捉えます。これらの事実は,機械感覚が空間を知覚するために有効であり,視覚の代替となる感覚系であることを意味しています。特に腕や白杖で辺りを探るのは,典型的なアクティブセンシングです。
今回の研究で,コオロギが触角のアクティブセンシングによって周囲の物体配置を「認識」している可能性があることが示されました。私たちが暗闇で手探りして部屋の中のものがどこにあるかを思い浮かべるように,コオロギも触角で得た情報によって,周囲の空間を「イメージ」しているのかもしれません。
現在私たちの研究グループでは,コオロギの空間認識能力がどこまで優れているのか,あるいは視覚情報とどのように統合されるのかを調べる行動学的な研究と,コオロギの脳内で空間配置を表現する神経活動を光学計測などの方法を使って明らかにする研究を進めています。このような知見を積み重ねることによって,より優れた“人工アクティブ・センサー”技術の開発にもつながる可能性もあります。例えば,白杖の動きに基づいた接触情報を障害者へよりアクティブにフィードバックして,より精度の高い空間知覚を促したり,白杖先端部にセンサーを付加して非接触の周辺情報を「機械感覚」として捉えたりするようにできるかもしれません。
発表論文:Nwuneke Okereke Ifere, Nodoka Sato, Hisashi Shidara, and Hiroto Ogawa (2022) Spatial perception mediated by insect antennal mechanosensory system. J. Exp. Biol., 225: jeb243276.(DOI:10.1242/jeb.243276)